In just one two-week “sprint” as the “scrum” methodology calls it. Our group has produced a fully functional simulated lidar sensor! We all expected this part of the project to take a lot longer and to come with unknown technical hurdles. But much to our delight, the implementation went smoothly, and by using a game-engine, we got access to a lot of ready-made functionality that suited the project perfectly.
The simulated lidar sensor we built uses Unity’s built in ability to cast a ray from a source point onto collidable objects and see where the ray hits, much like how a real life lidar would do it. We even managed to make it behave similar to the way a real sensor would. Refinements will be made in future updates, making it even more similar to the real deal.
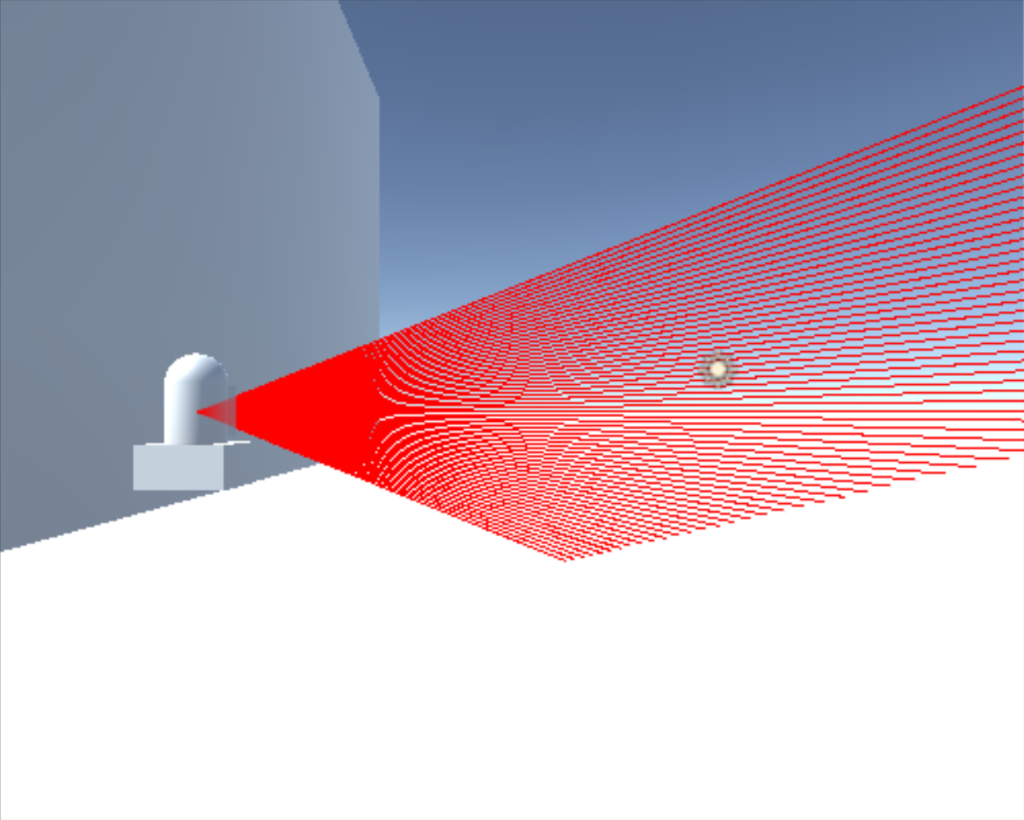
Virtual lidar sensor in Unity 5 (Philip Tibom)
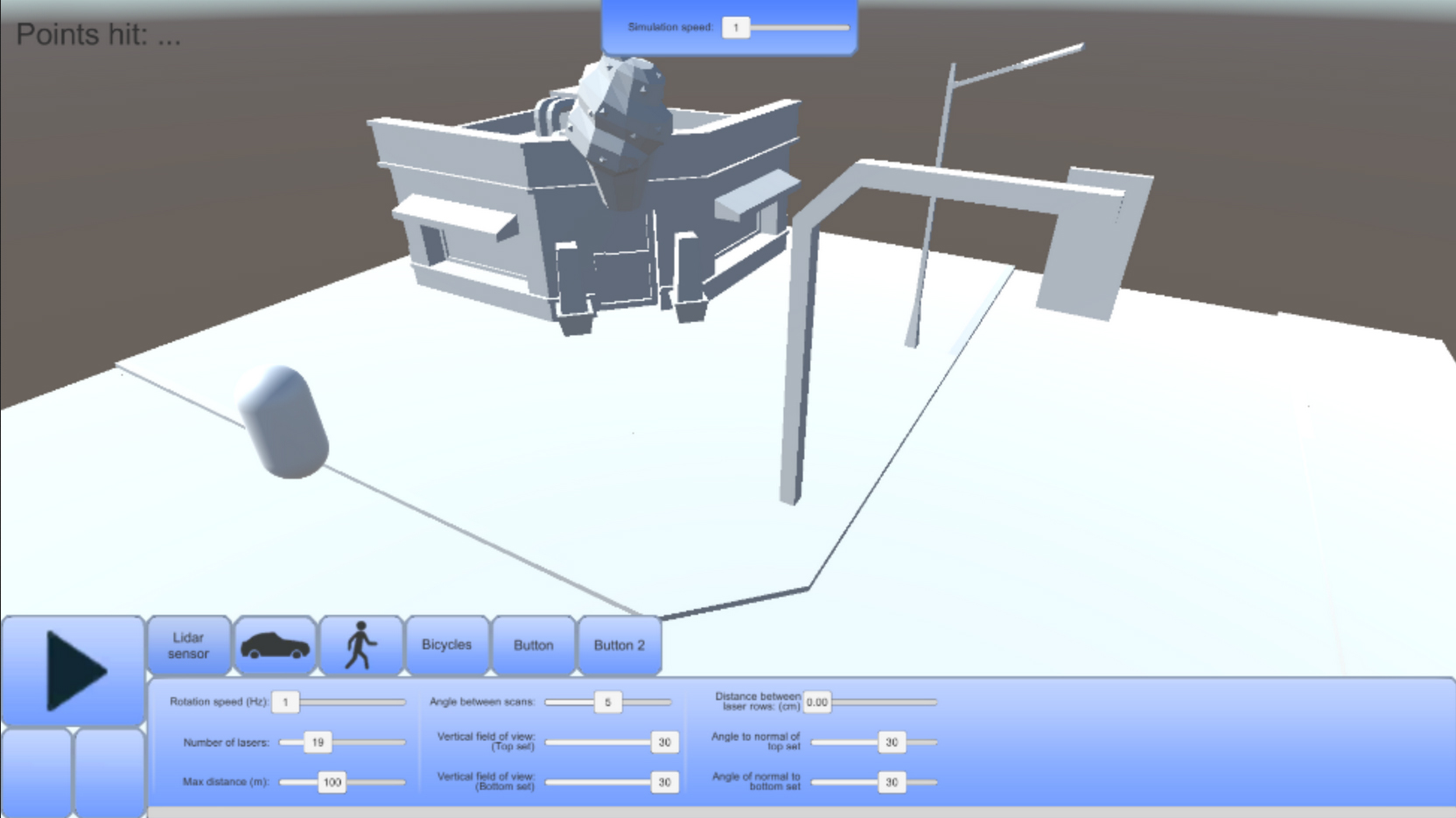
Now the focus has shifted to the features that we want to support. Including an editor and the export of the generated lidar data into some appropriate format. Moving cars and pedestrians, and pathfinding for them is also going to be explored. As is visualization of the collected lidar data, as points in a 3D space.
So far, the current progress has made us hopeful for the future of the project. Our spirits are high, and we are ready to deal with the challenges ahead.
/ The Lidar Group

Recent Comments