We have decided to release the project as open source.
The project is now available on GitHub.
We have also made a contact page if you would like to get in touch with us.
Weekly dev blog
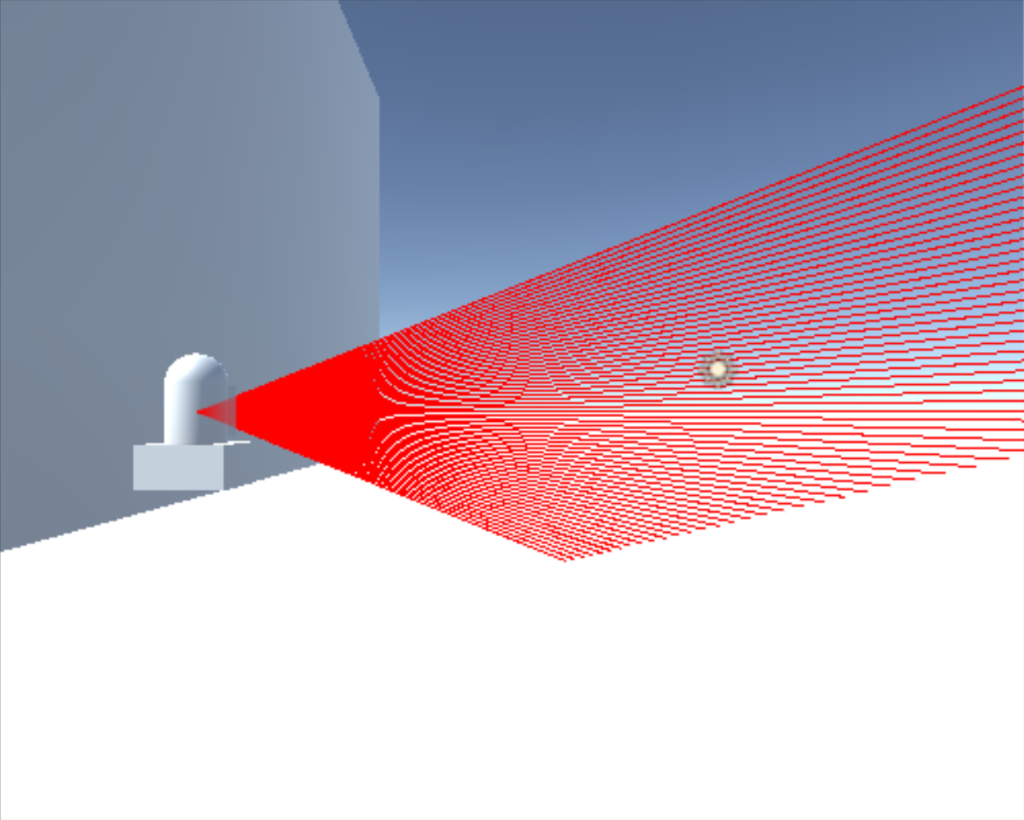
Here is a glimpse of what the final simulator can do.
Some of the clips in the trailer actually features an older version where some bugs are present, such as missing shadows and dark areas in the point cloud. These bugs are already fixed!
Peace out, the lidar group.
All of the separate elements of the project have been added together and it is starting to look more and more like a finished product!
The editor allows you to set the paths of all moving objects that you place into the scene.
Here we see moving pedestrians being placed, their paths being set. and the sensor being able to recognize their poses while they are not just moving, but being animated as well.
In addition to the static pedestrian meshes. We have added moving pedestrians that are a little less human-shaped, but in return has moving colliders, so that the simulted lidar will measure its movement when passing by. It also uses the navigation system to move along an editable path.
Look at him run!

Oh… you can’t because it’s a still image?
Well we can assure you he runs! Oh does he run!
/The Lidar Group
To make the simulator versatile and useful for the user, we planned on having a drag & drop editor and a GUI to change the parameters of the simulated LIDAR sensor. Now these plans have come to fruition and we have both the drag & drop feature and the GUI in place. Some more refinements might have to be made but it works! Isn’t it pretty?
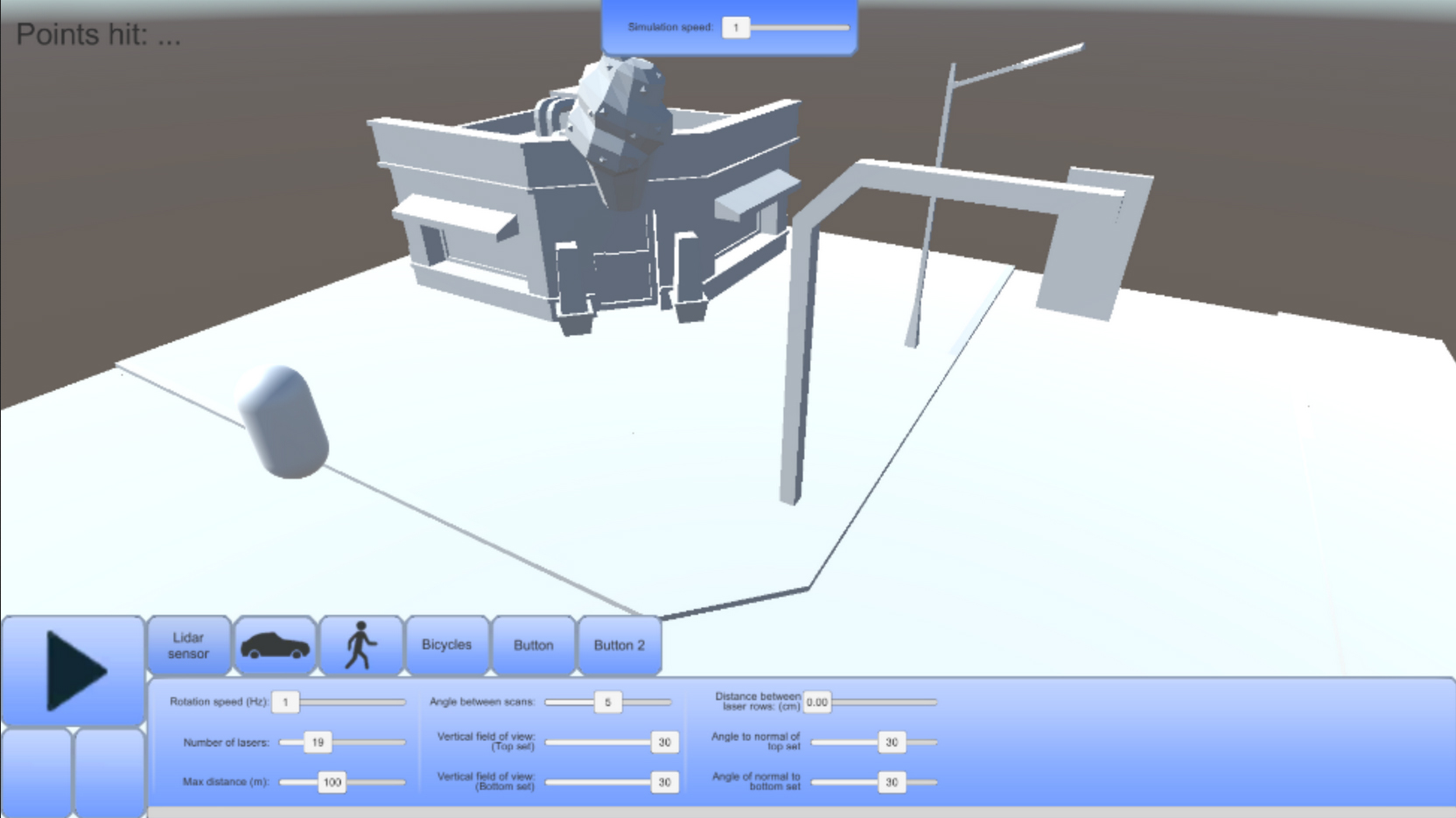
GUI by Jonathan
We’ve been working on the 3D environment and performance optimization. And completed our “mid-term presentation” performed by Rickard and Sherry. Something that is part of our bachelor thesis project at Chalmers.
This time, we won’t write as much as we believe the following video/demo shows a lot of our progress.
There are however some things to note about this demo. The vehicles are currently made out of big “box colliders” which in simple words means that they are not very detailed when it comes to the lidar sensors detection. This is something that we are going to work on in the future. Combined with a scenario editor, UI, and more. Stay tuned!
/ The Lidar Group
Virtual lidar sensor in Unity 5 (Philip Tibom)
/ The Lidar Group
We are a group of 6 students: Tobias Alldén, Martin Chemander, Sherry Davar, Jonathan Jansson, Rickard Laurenius and Philip Tibom. We have recently started our bachelor thesis project named “Generation and Processing of Lidar Data for Autonomous Vehicles” which will be ongoing during the entire spring 2017. At Chalmers Univeristy of Technology and University of Gothenburg.
The blog will be updated each week with posts explaining the current state of the project and discuss the different areas that are being worked on at these times.
Our goal is to create a simulator for lidar sensors that could be used to test how a real life lidar sensor would behave in different traffic conditions. In order to help researchers and engineers to generate customized and realistic lidar data.

Velodyne High-Def LIDAR (Steve Jurvetson., 2009). CC2.0
The finished project will contain the following features:
See you soon!
/ The Lidar Group
© 2026 Virtual Generation of Lidar Data for Autonomous Vehicles
Theme by Anders Noren — Up ↑
Recent Comments